Ant Weight Battlebot
V1 (scrapped):
An ambitious 3lb torsion spring powered nail/hammer design which was never completed due to complicated and impossible design choices. The goal was to keep the opponent at distance with the claws and penetrate the electronics or horizontal spinner using the nails, disabling the opponent.

V2 (scrapped):
The little brother to the incomplete V1, V2 was the 1lb version of V1 which never was scrapped before manufacturing for the same reason.

V3 (in progress):
After realizing that the design of a torsion spring powered nail hammer was impossible, I opted for a turtle shell spinner design. This design used timing belts as the tread for its tracks and a drone motor for the weapon. The CAD shown is a later variation of V3, with the original being much smaller and was the only robot of the 3 to reach the testing phase. It failed during the testing stage because of vibrations causing the robot to lose control and strike the ground.


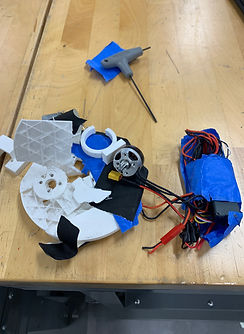

V3 Prototype:
V3's original prototype (right) used mostly 3d printed PLA parts with an aluminum spinner and steel blades (left). However, during testing, the robot would violently vibrate, eventually to the point where the spinner would strike the ground and rip the robot apart. a propeller was added to the top in hopes of creating greater stability but likely had no effect. The middle picture shows the aftermath of V3's first test. After this, the choice was made to adopt a wider belly pan with treads for greater stability. The original V3's footprint was 6" in diameter, while the newest design has a footprint of 10" in diameter. The V3 prototype was designed and built in 3 days.